Sophisticated magnetic encoders from RLS, a Slovenian company that specializes in the design and manufacture of magnetic encoders and motion sensing components, are helping Marsi Bionics develop robotic exoskeletons. The devices are designed to help bring mobility to patients who suffer from debilitating neurophysical conditions.
RLS is an associate company of Renishaw, a global metrology and healthcare technology provider which owns 50% of RLS and sells and supports its products worldwide.
Millions of people suffer from conditions such as paraplegia, cerebral palsy and spinal muscular atrophy. Neurological rehabilitation with passive aids such as canes, crutches and walkers is vital in the treatment of mobility issues caused by these conditions. Recent advances in robotics have allowed treatment with actively powered robot exoskeletons that support the patient’s body and enable greatly improved outcomes.
Located in Madrid, Marsi Bionics designs and builds custom exoskeletons for these applications with the aim of potentially replacing the wheelchair in everyday life for some patients. They give physically disabled people the freedom to stand, move and interact with their environment.
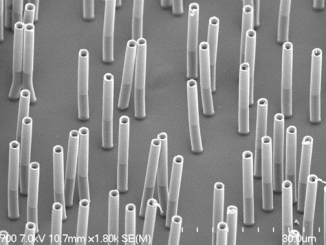
RLS has been chosen by the bionics developer to supply the latest in magnetic encoder technology for the creation of two new products — the ATLAS 2030 exoskeleton for children, shown at top, and the MB-Active Knee (MAK) single-joint exoskeleton for adults, shown below.

The ATLAS 2030 exoskeleton has up to six degrees of freedom per limb. The device enables the user to perform both unaided and self-actuated actions such as walking and sitting. Full exoskeletons consist of motorised joints, limbs, electronic control and power systems.
The challenge for the product designer is to find a compromise between a lightweight and compact structure that facilitates easy handling by the user, who might be physically weakened, and a robotic system that implements a physiologically complete biomechanical model.
For stable walking, equilibrium control of the exoskeleton-user assembly is achieved by tracking its zero-moment point (ZMP) references, which are based on the desired Normalized Dynamic Stability Margin (NDSM). The exoskeleton’s controller can subsequently adapt reference walking gait patterns, stored in memory, to maintain stability.
Successful dynamic walking requires precise control of the legs’ joint angles in terms of position, velocity and acceleration via rotary encoder feedback. This is difficult to achieve as each mechanical joint is compliant and includes elastic elements to help mimic and support the real joints and muscles of the human user.
Alberto Plaza, R&D engineer and manager of the MAK project at Marsi Bionics, describes the stringent encoder requirements of human exoskeletons: “The most difficult challenge when developing exoskeletons is the reliability of obtaining accurate angular position references, as they change from one structure to another, complicating standardisation and assembly of the devices.
Previously, we had used our own custom-made PCB encoders that were fully linked to the kinematic structures of the MAK and ATLAS exoskeletons. But problems regularly occurred because the joint motors generate stray magnetic fields that can interfere with magnetic encoders and cause faulty readings.
When designing the ATLAS and MAK devices, we decided that the components that make up the joints, such as the encoder, should be as compact as possible without compromising performance as there are significant space constraints. Another aspect to bear in mind is functionality: we need absolute rotary encoders to ensure that the angular position of each axis is always reliably known, even after a power failure.”
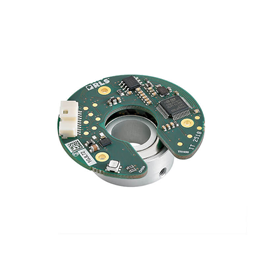
Marsi Bionics selected the RLS Orbis encoder for its ATLAS exoskeleton and the RLS RM08 encoder for its MAK knee-joint exoskeleton. The Orbis encoder is a component-level absolute rotary encoder designed for space constrained applications. It has a through-hole design, which enables direct mounting on the joint motor shaft. The RM08 encoder is a miniature high-speed rotary magnetic encoder: it has an 8 mm diameter and is IP68-rated for use in harsh environments.

Both encoders feature low weight and volume to minimise inertias, a non-contact and frictionless design to eliminate mechanical wear, and high angular resolution and accuracy to ensure excellent servo performance.
“We needed encoders that met our performance criteria without adding excess weight and volume, as any excess in the structure could be detrimental to the user’s mobility and might hamper the walking movement”, says Plaza. “It is of the utmost importance to achieve a stable movement and an exact position of each joint of the device. For that matter, the data collected from the encoders is fundamental for generating the position references. RLS and Renishaw provided us with the best encoder feedback solutions for our applications.”
Marsi Bionics was founded in 2013 as a technology spinoff of the Spanish National Research Council. With its manufacturing partner Escribano Mechanical and Engineering, it was recently able to participate in clinical trials of the ATLAS 2020 exoskeleton at Hospital Sant Joan de Déu in Barcelona.

Founded in 1989, RLS is based in Kovenda near Llubljana and has operated in close partnership with Renishaw since about 2000.
For more info, including a white paper from Renishaw on the project, see www.rls.si, www.renishaw.com, and www.marsibionics.com.