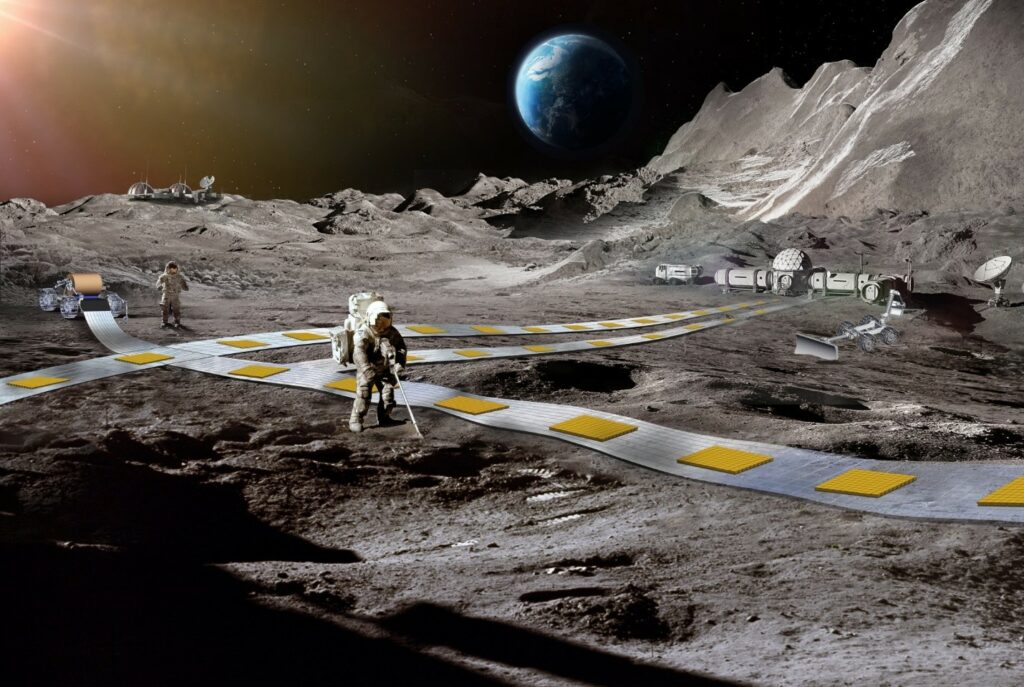
Credit: Ethan Schaler
Northrop Grumman Corporation has been selected by DARPA to further develop the concept of building a moon-based railroad network as part of the broader 10-year Lunar Architecture (LunA-10) Capability Study. The envisioned lunar railroad network could transport humans, supplies and resources for commercial ventures across the lunar surface – contributing to a space economy for the United States and international partners.
“We want to build the first lunar railway system, which will provide reliable, autonomous, and efficient payload transport on the Moon.” A durable, long-life robotic transport system will be critical to the daily operations of a sustainable lunar base in the 2030’s, as envisioned in NASA’s Moon to Mars plan and mission concepts like the Robotic Lunar Surface Operations 2 (RLSO2), to:
- Transport regolith mined for ISRU consumables (H2O, LOX, LH2) or construction
- Transport payloads around the lunar base and to / from landing zones or other outposts
We propose developing FLOAT — Flexible Levitation on a Track — to meet these transportation needs.
The FLOAT system employs unpowered magnetic robots that levitate over a 3-layer flexible film track: a graphite layer enables robots to passively float over tracks using diamagnetic levitation, a flex-circuit layer generates electromagnetic thrust to controllably propel robots along tracks, and an optional thin-film solar panel layer generates power for the base when in sunlight. FLOAT robots have no moving parts and levitate over the track to minimize lunar dust abrasion / wear, unlike lunar robots with wheels, legs, or tracks.
FLOAT tracks unroll directly onto the lunar regolith to avoid major on-site construction — unlike conventional roads, railways, or cableways. Individual FLOAT robots will be able to transport payloads of varying shape / size (>30 kg/m^2) at useful speeds (>0.5m/s), and a large-scale FLOAT system will be capable of moving up to 100,000s kg of regolith / payload multiple kilometers per day. FLOAT will operate autonomously in the dusty, inhospitable lunar environment with minimal site preparation, and its network of tracks can be rolled-up / reconfigured over time to match evolving lunar base mission requirements.
In Phase 2, we will continue to retire risks related to the manufacture, deployment, control, and long-term operation of meter-scale robots / km-scale tracks that support human exploration (HEO) activities on the Moon, by accomplishing the following key tasks:
- Design, manufacture, and test a series of sub-scale robot / track prototypes, culminating with a demonstration in a lunar-analog testbed (that includes testing various site preparation and track deployment strategies)
- Investigate impacts of environmental effects (e.g. temperature, radiation, charging, lunar regolith simulant contamination, etc.) on system performance and longevity
- Investigate / define a technology roadmap to address technology gaps and mature manufacturing capability for critical hardware (e.g. large-area magnetic arrays with mm-scale magnetic domains, and large-area flex-circuit boards)
- Continue refining simulations of FLOAT system designs with increased fidelity, to provide improved performance estimates under the RLSO2 mission concept
We will also leverage these sub-scale prototypes to explore opportunities for follow-on technology demonstrations on sub-orbital flights (via Flight Opportunities / TechFlights) or lunar technology demos (via LSII / CLPS landers)
By Ethan Schaler
NASA Jet Propulsion Laboratory