While rich tourists may be thinking about a space voyage, scientists at NASA have their sights on more mundane pursuits, like moving payloads around the moon. Magnetic levitation could be the key.
Considered early-stage research into futuristic space ideas, a lunar levitation track system is one of several advanced space concepts being studied at NASA’s Jet Propulsion Laboratory in Pasadena, California. It is under the auspices of the NASA Innovative Advanced Concepts (NIAC) Program which nurtures visionary ideas that could transform future NASA missions with the creation of radically better or entirely new aerospace concepts while engaging America’s innovators and entrepreneurs as partners in the journey. The projects study innovative, technically credible, advanced concepts that could one day change the possible in aerospace.
“NIAC Fellows are known to dream big, proposing technologies that may appear to border science fiction and are unlike research being funded by other agency programs,” said Jenn Gustetic, director of early-stage innovations and partnerships within NASA’s Space Technology Mission Directorate (STMD). “We don’t expect them all to come to fruition but recognize that providing a small amount of seed-funding for early research could benefit NASA greatly in the long run.” Initial proposals selected in the program receive grants from NASA up to $125,000. If their initial 9-month feasibility studies are successful, NIAC Fellows can apply for Phase II awards.
Among the selections this year is Ethan Schaler, a robotics engineer at JPL offering an infrastructure idea for autonomously transporting cargo on the Moon using magnetic robots that would levitate over a flexible track. The tracks would unroll on the lunar surface, forgoing major on-site construction associated with building roads and railways on Earth. Schaler will also research another NIAC Phase I study in parallel: swimming micro-robots for exploring ocean worlds.
“We want to build the first lunar railway system, which will provide reliable, autonomous, and efficient payload transport on the Moon. A durable, long-life robotic transport system will be critical to the daily operations of a sustainable lunar base in the 2030’s, as envisioned in NASA’s Moon to Mars plan and mission concepts like the Robotic Lunar Surface Operations 2,” explains Schaler. It would be tasked with transporting lunar minerals mined for consumables or construction on the Moon, also for transporting payloads around the lunar base, landing zones or other outposts
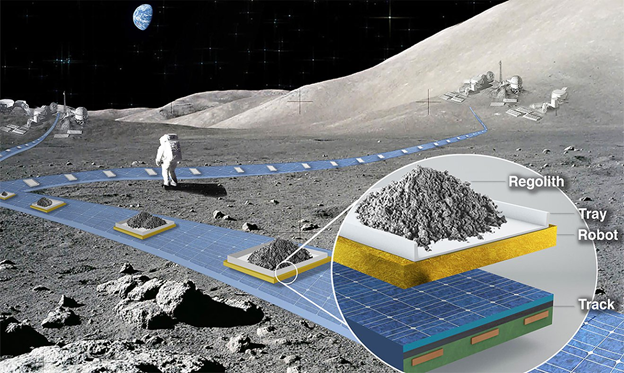
The proposed FLOAT system employs unpowered magnetic robots that levitate over a three-layer flexible film track. A graphite layer enables robots to passively float over tracks using diamagnetic levitation, a flex-circuit layer generates electromagnetic thrust to controllably propel robots along tracks, and an optional thin-film solar panel layer generates power for the base when in sunlight. The robots have no moving parts and levitate over the track to minimize lunar dust abrasion, unlike lunar robots with wheels, legs, or tracks.
FLOAT tracks unroll directly onto the lunar regolith to avoid major on-site construction. Individual FLOAT robots would be able to transport payloads of varying shape and size up to 33 kg/sq meter at speeds greater than 0.5 meter per second. A large-scale FLOAT system could move up to 100,000 kgs of payload per day while consuming less than 40 kW of power. For more info, see www.nasa.gov/niac.